

Wprowadzenie
Niniejszy artykuł przedstawia kolejne wnioski z przeprowadzonych przez autorów badań dotyczących elektronicznych systemów bezpieczeństwa o różnych stopniach komplikacji. Badano procesy eksploatacyjno-niezawodnościowe rozproszonych systemów bezpieczeństwa, ze szczególnym uwzględnieniem tych dotyczących wyższych kategorii zagrożeń (Z3 i Z4) oraz klasyfikowanych jako SA3 i SA4. Nacisk położono na obiekty o specjalnym znaczeniu. Zwykle posiadają one bardzo rozbudowane elektroniczne systemy bezpieczeństwa o charakterze rozproszonym, obejmujące również telewizję dozorową wysokiej rozdzielczości z rejestracją na dyskach twardych, kontrolę dostępu - realizowaną niezależnie lub opcjonalnie stanowiącą fragment centrali systemu sygnalizacji włamania i napadu (SSWiN), system przeciwpożarowy (niezależny lub w ograniczonym zakresie stanowiący również fragment ww. centrali). Bardzo często elektroniczne systemy bezpieczeństwa są powiązane z systemami mechanicznymi (drzwi, okna a w nich szyby o klasach od P3 do P7, rygle drzwiowe, trzymaki magnetyczne itp.).
W Zabezpieczeniach nr 1/2 (41/42) z roku 2005 autorzy przeanalizowali struktury niezawodnościowe w rozproszonych systemach bezpieczeństwa, podając schematy niezawodnościowe spotykane w praktyce oraz przedstawili w postaci grafów relacje zachodzące w elektronicznych systemach bezpieczeństwa. Przeprowadzono również analizę matematyczną w postaci równań, za pomocą których można obliczyć prawdopodobieństwo przebywania systemów w ściśle określonych stanach eksploatacyjno-niezawodnościowych. Były to jednak propozycje teoretyczne wymagające podbudowy praktycznej.
Takie badania autorzy zaczęli prowadzić, poczynając od 2005 roku: zbierali dane eksploatacyjno-niezawodnościowe z bardzo wielu elektronicznych systemów bezpieczeństwa o skomplikowanej budowie (opracowano specjalne karty do zbierania danych o uszkodzeniach). W trakcie tych działań napotykali na wiele problemów eksploatacyjno-niezawodnościowych. Dotyczyły one zwłaszcza systemów rozproszonych zaprojektowanych i zrealizowanych w obiektach o szczególnym przeznaczeniu (ze zrozumiałych względów nie można podać, jakie to są obiekty).
W Zabezpieczeniach nr 1 (47) z 2006 roku autorzy przedstawili schemat blokowy rozproszonego systemu bezpieczeństwa zaprojektowanego z wykorzystaniem jednostki mikroprocesorowej typu INTEGRA 64. Analizując już rzeczywisty (trudny ze względu na swoje przeznaczenie) obiekt, zbudowano schemat niezawodnościowy elektronicznego systemu bezpieczeństwa interpretujący ww. schemat ideowy. Następnie zbudowano model eksploatacyjno-niezawodnościowy w postaci grafu przejść. Wykorzystano również skomplikowany aparat matematyczny umożliwiający obliczenie przebywania systemu bezpieczeństwa w określonym stanie eksploatacyjnym (np. przejście ze stanu pełnej zdatności do stanu zagrożenia bezpieczeństwa). Wtedy nasunął się istotny wniosek: niezawodność rozproszonych systemów bezpieczeństwa (zwanych też systemami nadzoru) należy kształtować już na etapie projektowania oraz praktycznej realizacji systemu. Można ją również korygować podczas eksploatacji (np. rozbudowa już istniejącego systemu), przez odpowiednie zmiany w strukturze niezawodnościowej, choć niektóre bloki systemu są na taką korektę odporne.
Syntetyczny opis praktycznego rozproszonego systemu bezpieczeństwa
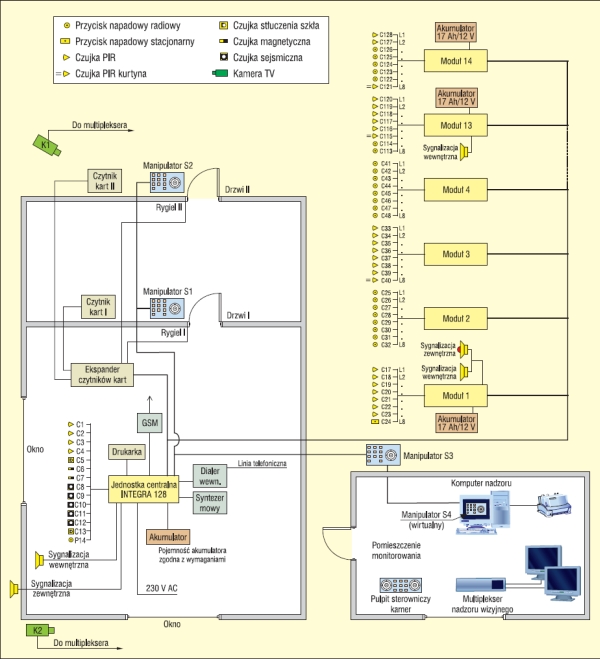
Na rys. 1. przedstawiono zmodyfikowany rozproszony system bezpieczeństwa, znacznie bardziej rozbudowany, niż wspomniany powyżej. Modyfikacja wynikała z potrzeb obiektu specjalnego znaczenia. Wprowadzono jednostkę mikroprocesorową INTEGRA 128 o 128 liniach wejściowych, dobudowano wiele modułów rozszerzających (na dwóch magistralach jest ich 14). Znacznie rozbudowano pomieszczenie ochrony, w którym system bezpieczeństwa jest monitorowany. Tam też znajduje się komputer nadzorujący pracę SSWiN i 16-wejściowy multiplekser cyfrowy z rejestracją zdarzeń na dyskach twardych. Również w tym pomieszczeniu znajdują się urządzenia, zapewniające dwie drogi monitorowania: telekomunikacyjną i radiową. Elektroniczny system bezpieczeństwa został wyposażony w cztery manipulatory LCD, w tym jeden wirtualny. Wynika to z organizacji obiektu. Z pomieszczenia ochrony są sterowane zarówno szybkoobrotowe głowice kamer TV, jak i zastosowane w kamerach obiektywy o zmiennej ogniskowej. Rezerwowe źródła zasilania (akumulatory) w przypadku awarii zasilania zasadniczego (230V) umożliwiają pracę systemu bezpieczeństwa przez minimum 72 godziny. Kamery CCTV współpracują z oświetlaczami podczerwieni o sporym zasięgu (od 8 do 25 m).
Warto również wspomnieć o mechanicznych zabezpieczeniach zaproponowanych i zrealizowanych w obiekcie rzeczywistym specjalnego znaczenia. Są to okna posiadające szyby kategorii P5. W pomieszczeniach widocznych na rys. 1. zostały zainstalowane atestowane stalowe drzwi (I i II) z atestowanymi zamkami. Wprowadzono rygle elektromagnetyczne sterowane czytnikami kart (z rejestracją wejścia/wyjścia). System kontroli dostępu, który jest zrealizowany na tej samej jednostce mikroprocesorowej, ze względów bezpieczeństwa współpracuje z systemem przeciwpożarowym. Ściany, podłogi, sufity w pomieszczeniach są chronione czujkami sejsmicznymi klasy S. Podobnymi czujkami są chronione sejfy pancerne.
Model eksploatacyjno-niezawodnościowy rzeczywistego systemu bezpieczeństwa
Na rys. 2. przedstawiono model eksploatacyjno-niezawodnościowy, który powstał w wyniku analizy rzeczywistego elektronicznego systemu bezpieczeństwa przedstawionego na rys. 1. Ze względu na duży stopień komplikacji rzeczywistego systemu bezpieczeństwa zastosowano niezbędne uproszczenia, takie, które nie wypaczą logiki badań.
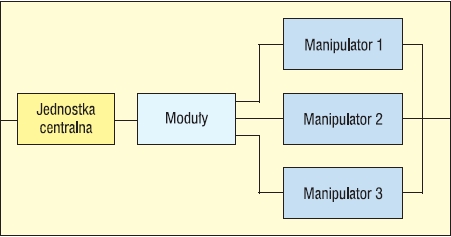
14 modułów rozszerzających zostało przedstawionych w postaci jednego bloku i dołączonych do bloku jednostki mikroprocesorowej (centralnej). Do magistral zostały ze względów logistycznych dołączone cztery manipulatory LCD, w tym jeden wirtualny. Tak zbudowany schemat eksploatacyjno-niezawodnościowy stanowi tzw. mieszany model niezawodnościowy (trudny do analizy matematycznej). Można więc tu mówić o problemie nadmiarowości. Warto przypomnieć, że z punktu widzenia eksploatacji i niezawodności można wyróżnić następujące rodzaje nadmiarowości:
- nadmiar strukturalny,
- nadmiar funkcjonalny,
- nadmiar parametryczny,
- nadmiar informacyjny,
- nadmiar wytrzymałościowy,
- nadmiar czasowy,
- nadmiar elementowy.
Analizując szczegółowo schemat przedstawiony na rys. 1. i jego uproszczony schemat niezawodnościowy (rys. 2.), można stwierdzić, że mogą mieć miejsce wszystkie ww. nadmiary.
Jednak dla badań szczególnie istotne są dwa: strukturalny (przejście na rezerwowe źródło zasilania w przypadku awarii źródła zasadniczego) i funkcjonalny (kilka manipulatorów LCD i jeden wirtualny). Ten ostatni nadmiar funkcjonalny jest bardzo ważny ze względu na logikę i procedury obowiązujące w tego typu obiektach specjalnego znaczenia.
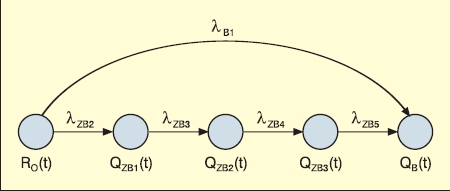
W wyniku analizy blokowego schematu niezawodnościowego (uproszczonego) autorzy zaproponowali graf relacji zachodzących w rozproszonym systemie bezpieczeństwa. Relacje te dla rzeczywistego obiektu zostały przedstawione na rys. 3.
Szczegółowy mechanizm przejść z określonych stanów został opisany wcześniej (Zabezpieczenia nr 1/2 (41/42), 2005 rok).
Jeżeli dokona się przekształceń matematycznych (niestety, bardzo skomplikowanych), można otrzymać zależności, które pozwolą wyznaczyć wartości prawdopodobieństw przebywania rozważanego (rzeczywistego) elektronicznego systemu bezpieczeństwa w odpowiednich stanach:
- pełnej zdatności R0
- zagrożenia bezpieczeństwa QZB1

- zagrożenia bezpieczeństwa QZB2
- zagrożenia bezpieczeństwa QZB3
- zawodności bezpieczeństwa QB
Oznaczenia w powyższych zależnościach są następujące:

Obliczenia wskaźników niezawodnościowo-eksploatacyjnych
a) czas obserwacji systemu - 1 rok = 8760 h.
b) liczba badanych systemów: 100 (takich jak na rys. 1. lub podobnych)
c) liczba uszkodzonych manipulatorów odpowiednio w gałęziach modelu niezawodnościowego: 4, 3, 2, i 1.
d) liczba uszkodzonych modułów i central (łącznie). Otrzymane wartości prawdopodobieństw przebywania systemu w:
- stanie pełnej zdatności systemu R0: 0,9504
- stanie zagrożenia bezpieczeństwa QZB1: 0,039195
- stanie zagrożenia bezpieczeństwa QZB2: 0,000601
- stanie zagrożenia bezpieczeństwa QZB3: 0,000004
- stanie zawodności bezpieczeństwa QB: 0,009798
Powyższe wskaźniki zostały wyliczone na podstawie ww. równań z wykorzystaniem autorskiego programu komputerowego Wspomagania Decyzji Niezawodnościowo-Eksploatacyjnych Transportowych Systemów Nadzoru.
Zakończenie i wnioski
Przedstawione wyniki obliczeń wymagają pewnych wyjaśnień. Gdyby przyjąć za ostateczny wynik R0=0,9504, a więc stan pełnej zdatności elektronicznego systemu bezpieczeństwa, wynik ten nie byłby satysfakcjonujący. Należy brać jednak pod uwagę, czego dotyczą wskaźniki: QZB1, QZB2, QZB3. Wyliczone wartości dotyczą stanu zagrożenia bezpieczeństwa wynikające z niezdatności kolejnych trzech manipulatorów LCD (w systemie bezpieczeństwa jest ich cztery). Aby więc mieć pełny obraz zdatności elektronicznego systemu bezpieczeństwa przedstawionego na rys. 1., należy przyjąć pewne założenia. Mianowicie:
- wszystkie trzy manipulatory LCD realizują identyczne funkcje,
- podobnie i czwarty manipulator, wirtualny (jednak rozpatrywany rozdzielnie),
Jeśli przyjąć takie założenie, stan pełnej zdatności elektronicznego systemu bezpieczeństwa można wyrazić równaniem:
R0(całk)=R0+QZB1+QZB2+QZB3=0,9504+0,039195+0,000601+0,000004=0,9902
Można więc przedstawić warunek wystarczający dla analizowanego elektronicznego systemu bezpieczeństwa obiektu specjalnego przeznaczenia:
0,9902 . R0całk. . 0,9504
Można odczytać, że dla granicy prawostronnej zdatny jest tylko manipulator wirtualny, a dla lewostronnej zdatne są wszystkie. Tak więc w podanym przedziale można przyjąć, że system bezpieczeństwa znajduje się w pełnej zdatności.
W trakcie analizy elektronicznego systemu bezpieczeństwa nie były brane pod uwagę wszystkie procedury dotyczące obiektu specjalnego przeznaczenia. W przypadku gdy wszystkie cztery manipulatory są w stanie zawodności bezpieczeństwa (jest to możliwe), analizowany system bezpieczeństwa nie nadaje się do dalszej eksploatacji.
Literatura
1. Instrukcje serwisowe systemów: GALAXY, RANKOR, SATEL, DSC, SIEMENS.
2. Będkowski L., Dąbrowski T.: Podstawy eksploatacji, cz. II Podstawy niezawodności eksploatacyjnej. Wojskowa Akademia Techniczna, Warszawa, 2006.
3. Szulc W., Rosiński A.: Problemy eksploatacyjno-niezawodnościowe rozproszonego systemu bezpieczeństwa, Zabezpieczenia, nr 1 (47), Warszawa, 2006.
4. Rosiński A.: Analiza struktur niezawodnościowych w rozproszonych systemach bezpieczeństwa. Zabezpieczenia nr 1/2 (41/42), Warszawa, 2005.
5. Ważyńska-Fiok K., Jaźwiński J.: Niezawodność systemów technicznych, PWN, Warszawa, 1990.
Waldemar Szulc
POLITECHNIKA WARSZAWSKA, WYDZIAŁ TRANSPORTU, ZAKŁAD TELEKOMUNIKACJI W TRANSPORCIE WYŻSZA SZKOŁA MENEDŻERSKA W WARSZAWIE, WYDZIAŁ INFORMATYKI
Adam Rosiński
POLITECHNIKA WARSZAWSKA, WYDZIAŁ TRANSPORTU, ZAKŁAD TELEKOMUNIKACJI W TRANSPORCIE
Zabezpieczenia 4/2007