

 Skuteczna realizacja celów ochrony związanych z pracą systemów sygnalizacji włamania i napadu to szczelne zabezpieczenie obiektu przed możliwymi zagrożeniami i reagowanie na każdą próbę wtargnięcia intruza do jego wnętrza. Wykorzystywane do ochrony obiektów systemy sygnalizacji włamania i napadu mają za zadanie przekazać użytkownikowi danego systemu informacje o zidentyfikowaniu zagrożenia. Im dalej znajduje się miejsce zaatakowane przez intruza, tym dłuższy jest czas przeciwdziałania zaistniałemu zagrożeniu, dlatego elementy detekcyjne systemu należy dobrać w taki sposób, aby umożliwić prawidłową identyfikację zagrożenia na jak najwcześniejszym etapie jego powstania. W obiektach budowlanych można zastosować dopplerowskie czujki ultradźwiękowe. Główną część artykułu stanowi charakterystyka ultradźwięków i omówienie ich wykorzystania w dopplerowskich czujkach ruchu oraz analiza i ocena ich praktycznego zastosowania w ochronie obiektów przed włamaniem.
Skuteczna realizacja celów ochrony związanych z pracą systemów sygnalizacji włamania i napadu to szczelne zabezpieczenie obiektu przed możliwymi zagrożeniami i reagowanie na każdą próbę wtargnięcia intruza do jego wnętrza. Wykorzystywane do ochrony obiektów systemy sygnalizacji włamania i napadu mają za zadanie przekazać użytkownikowi danego systemu informacje o zidentyfikowaniu zagrożenia. Im dalej znajduje się miejsce zaatakowane przez intruza, tym dłuższy jest czas przeciwdziałania zaistniałemu zagrożeniu, dlatego elementy detekcyjne systemu należy dobrać w taki sposób, aby umożliwić prawidłową identyfikację zagrożenia na jak najwcześniejszym etapie jego powstania. W obiektach budowlanych można zastosować dopplerowskie czujki ultradźwiękowe. Główną część artykułu stanowi charakterystyka ultradźwięków i omówienie ich wykorzystania w dopplerowskich czujkach ruchu oraz analiza i ocena ich praktycznego zastosowania w ochronie obiektów przed włamaniem.
1. Wstęp
Ze względu na długość procesu wykrywania zagrożenia ważne jest, aby system alarmowy wyposażony był w skuteczne środki detekcyjne działające zarówno wewnątrz obiektu (detekcja zaistniałej penetracji obiektu), jak i na jego peryferiach (detekcja podjęcia próby penetracji obiektu). Umożliwia to sprawny przebieg procesu wykrywania zagrożeń i ich neutralizację na wstępnym etapie powstawania [1,2].
Układami zabezpieczającymi strefy obwodowe budynku są najczęściej zabezpieczenia służące do detekcji prób wejścia do obiektu przez otwory okienne i drzwiowe. Obecnie otwory te zabezpieczane są czujkami kontaktronowymi lub stykowymi, które są podstawowymi elementami ochrony peryferyjnej obiektu. Wadą takich zabezpieczeń jest możliwość dość prostego ich obejścia, np. poprzez wybicie szyby. Czujka zabezpieczająca otwór nie działa, nie nastąpi wtedy detekcja, a zagrożenie może zostać wykryte już tylko przez elementy detekcyjne zainstalowane wewnątrz chronionego obiektu.
Wydaje się, że w przypadku zastosowania czujek ultradźwiękowych do ochrony przestrzeni między szybami chroniona będzie cała ta przestrzeń. Każdy ruch w jej obrębie będzie wywoływał sygnał alarmowy. Ze względu na znikomą przenikalność fal ultradźwiękowych przez elementy konstrukcyjne okna (szyby, ramy) zaletą opisywanego rozwiązania będzie ograniczenie chronionego obszaru tylko do przestrzeni między szybami. Ze względu na brak elementów ruchomych w tym miejscu zminimalizowane będzie również ryzyko generowania fałszywych alarmów przez czujkę. Artykuł stanowi pewnego rodzaju polemikę z panującą powszechnie opinią o nieprzydatności czujek ultradźwiękowych w systemach alarmowych. Ta zła opinia wynika z niewielkiego zasięgu czujki i możliwości wywoływania fałszywych alarmów przez liczne czynniki zewnętrzne. Z tych powodów czujki ultradźwiękowe nie znalazły szerokiego zastosowania w systemach alarmowych w budynkach, są natomiast powszechnie stosowane w alarmach samochodowych jako element umożliwiający wykrycie próby wejścia do wnętrza pojazdu.
W artykule zostanie przedstawiona koncepcja umieszczenia ultradźwiękowych czujek ruchu pomiędzy poszczególnymi warstwami okien skrzynkowych. Okna tego typu są dość powszechnie stosowane w budownictwie mieszkaniowym, a ich skuteczne zabezpieczenie umożliwi szybką identyfikację zagrożenia. Celem prowadzonych badań będzie ocena możliwości wykrywania prób sforsowania zabezpieczanej strefy (okna) oraz porównanie czujek ultradźwiękowych ze stosowanymi obecnie rozwiązaniami (czujkami kontaktronowymi i stykowymi) pod względem skuteczności.
2. Charakterystyka ultradźwięków i dopplerowskich czujek ultradźwiękowych
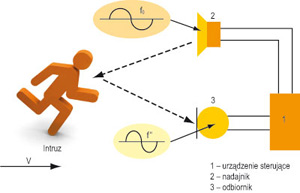
Rys. 1. Efekt Dopplera w ultradźwiękowej czujce ruchu – ruch obiektu w kierunku układu nadajnik-odbiornik
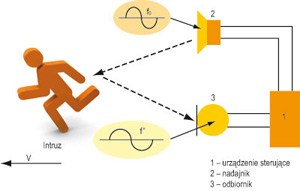
Rys. 2. Efekt Dopplera w ultradźwiękowej czujce ruchu – ruch obiektu od układu nadajnik-odbiornik
Ultradźwiękami nazywa się drgania o częstotliwości przekraczającej górną granicę słyszalności ucha ludzkiego (od 16-20 kHz do 10 GHz). Fale ultradźwiękowe o częstotliwości do 0,6 MHz mogą rozchodzić się w ośrodkach stałych, ciekłych i gazowych [5]. Podstawowe właściwości ultradźwięków [4]:
- fale ultradźwiękowe rozchodzą się promieniście od źródła wzdłuż linii propagacji;
- na granicy ośrodków rozchodzenia się część energii fali ultradźwiękowej jest rozpraszana, część pochłaniana, a część odbijana w stopniu zależnym od rodzaju granicy ośrodków;
- tłumienie fal dźwiękowych w powietrzu rośnie wraz ze wzrostem wilgotności, ciśnienia i zapylenia oraz w postępie geometrycznym wraz ze wzrostem częstotliwości fali;
- energia fali ultradźwiękowej jest odwrotnie proporcjonalna do kwadratu odległości od źródła.
Dopplerowskimi czujkami ruchu (detektorami ruchu) nazywa się elementy systemu alarmowego wykorzystujące do detekcji zagrożenia i wytworzenia sygnału alarmowego zjawisko zmiany częstotliwości fali odbieranej (w porównaniu z wzorcową częstotliwością fali emitowanej przez nadajnik), które występuje wówczas, gdy odległość między nadajnikiem a odbiornikiem, jaką musi przebyć emitowana fala, ulega zmianie (efekt Dopplera). Wszystkie rodzaje detektorów ruchu zalicza się do czujek aktywnych, ponieważ zasada ich działania opiera się na emisji fali (a więc pewnej ilości energii) do otoczenia [3,5].
W przypadku ultradźwiękowych czujek ruchu wykorzystywanych w systemach alarmowych dochodzi do sytuacji, w których nadajnik i odbiornik pozostają w spoczynku względem siebie. W takim przypadku warunkiem powstania zjawiska Dopplera jest zmiana drogi, jaką musi przebyć emitowana fala dźwiękowa odbijająca się od obiektu będącego w ruchu i znajdującego się pomiędzy nieruchomym nadajnikiem i odbiornikiem. Dla jednego sygnału wysyłanego z nadajnika i docierającego do odbiornika zachodzą w istocie bezpośrednio następujące po sobie dwa zjawiska Dopplera: pierwsze zachodzi pomiędzy nadajnikiem a obiektem, a drugie – pomiędzy obiektem a odbiornikiem. Jeżeli wszystkie obiekty pozostające w zasięgu czujnika będą pozostawały w spoczynku, droga, jaką musi przebyć emitowana fala, będzie stała. Nie nastąpi wtedy zmiana częstotliwości rejestrowanej przez odbiornik w porównaniu z częstotliwością emitowaną przez nadajnik (rys. 3). Jeśli w polu działania czujki wystąpi ruch obiektu, od którego emitowana fala będzie się odbijać, to droga, jaką musi przebyć fala, a w związku z tym także częstotliwość rejestrowana w odbiorniku, zacznie ulegać zmianie (rys. 4). Zależność określająca wartość częstotliwości Dopplerowskiej Δf ma postać [3,4,6]:
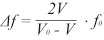
(1)
przy założeniu, że:
Vx > 0 w przypadku przybliżania się obiektu do układu nadajnik – odbiornik;
Vx < 0 w przypadku oddalania się obiektu od układu nadajnik – odbiornik.
3. Ocena możliwości i przydatności dopplerowskich czujek ultradźwiękowych w ochronie obwodowej obiektów
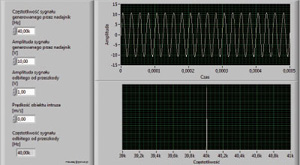
Rys. 3. Przebieg czasowy sygnału i widmo częstotliwości dla stanu normalnego czujki
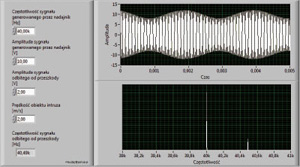
Rys. 4. Przebieg czasowy sygnału i widmo częstotliwości w przypadku wykrycia zagrożenia
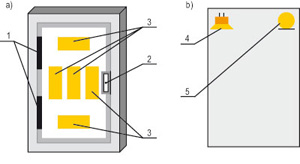
Rys. 5. Model okna skrzynkowego z umieszczoną wewnątrz niego ultradźwiękową czujką
a) rozmieszczenie elementów umożliwiających przeprowadzenie testów
b) rozmieszczenie elementów ultradźwiękowej czujki ruchu
1 – zawiasy, 2 – klamka, 3 – otwory z przesłonami, 4 – nadajnik czujki, 5 – odbiornik czujki
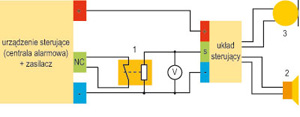
Rys. 6. Schemat układu połączeń urządzeń w modelu, 1 – przekaźnik, 2 – nadajnik ultradźwiękowej czujki ruchu, 3 – odbiornik ultradźwiękowej czujki ruchu
Aby potwierdzić przydatność ultradźwiękowych czujek ruchu jako rozwiązania alternatywnego względem rozwiązań, które są obecnie stosowane do zabezpieczania otworów okiennych, czyli kontaktronowych i stykowych czujek, przeprowadzono badania.
W badaniach sprawdzających możliwości wykorzystania ultradźwiękowych czujek ruchu do zabezpieczania otworów okiennych w oknach wielowarstwowych (np. typu skrzynkowego) użyto zbudowanego do tego celu modelu takiego okna (rys. 5) Konstrukcja modelu okna została opracowana w taki sposób, aby można było wykonać następujące testy:
- forsowanie okna przez wyważenie jego skrzydła (zdarzenie 1),
- forsowanie okna przez otworzenie jego skrzydła (zdarzenie 2),
- forsowanie okna po wykonaniu w jego części otworu, ale bez otwierania jego skrzydła – zastosowano różne warianty umiejscowienia otworów (zdarzenie 3),
- zakłócenie pracy systemu alarmowego przez próby wywołania fałszywego alarmu – wykonywanie ruchów po zewnętrznej stronie okna (zdarzenie 4).
Testowany model był wyposażony dodatkowo w układ pomiarowy (rys. 6). W skład układu pomiarowego wchodziły następujące elementy: ultradźwiękowa czujka ruchu typu URZ0530, centrala alarmowa, przekaźnik pośredniczący, woltomierz i zasilacz stabilizowany 12 V.
Po podłączeniu zasilania o wartości U=12 V do układu sterowania czujki URZ0530 wystąpiły następujące poziomy napięć na wyjściu sygnałowym czujki:
- Us=6,68 V (w stanie normalnym, gdy wszystkie elementy czujki działają poprawnie i nie ma zaburzenia, które wywołałoby reakcję czujki);
- Us=0 V (w stanie alarmowania, gdy wszystkie elementy czujki działają poprawnie i czujka jest pobudzona na skutek wykrycia zaburzenia).
Model okna typu skrzynkowego został dodatkowo wyposażony w standardową czujkę kontaktronową i standardową czujkę stykową. Umieszczenie tych elementów w modelu umożliwiło sprawdzenie skuteczności działania układu w różnych konfiguracjach sprzętowych. Dzięki temu możliwa jest ocena działania tych elementów w różnych przypadkach.
Skuteczność działania systemu określano na podstawie prawidłowego (oczekiwanego) zadziałania systemu w różnych wariantach zdarzeń. W przypadku pierwszych trzech zdarzeń oczekiwanym rezultatem było pobudzenie systemu alarmowego, natomiast w przypadku czwartego zdarzenia – brak pobudzenia. Wyniki przeprowadzonych doświadczeń zostały przedstawione w tabeli 1.
Testy, których wyniki znajdują się w tabeli 1, nie uwzględniały możliwości sabotowania poszczególnych układów detekcyjnych podczas próby sforsowania zabezpieczenia. W przypadku testów w bardziej urealnionych warunkach (dopuszczona ingerencja intruza w system w celu sabotowania jego działania) możliwe było sforsowanie zabezpieczeń bez wywołania alarmu (zdarzenie 2), gdy zastosowano układy wyposażone w kontaktron, a zwłaszcza w czujkę stykową. Gdy zastosowano czujkę ultradźwiękową, takie próby były nieskuteczne. Jedynie w przypadku ustawienia zbyt dużej czułości układu detekcyjnego ultradźwiękowej czujki ruchu możliwe było występowanie w układzie fałszywych alarmów powodowanych pobudzaniem się tej czujki.
4. Podsumowanie
Ważnym czynnikiem, który decyduje o skuteczności działania systemu alarmowego, jest czas wykrycia zagrożenia. Im krótszy jest czas pomiędzy chwilą wykrycia zagrożenia a reakcją użytkownika systemu, tym większa jest szansa na ograniczenie szkód. Dlatego ważne jest wyposażenie systemów nadzoru w środki techniczne, dzięki którym skuteczne wykrycie zagrożenia następuje jeszcze przed wtargnięciem intruza do wnętrza obiektu. W związku z tym ciężar procesu detekcji zagrożenia powinien być przesuwany w stronę ochrony obwodowej obiektu.
Stosowane obecnie do zabezpieczania otworów okiennych i drzwiowych rozwiązania w postaci czujek kontaktronowych i stykowych w niektórych sytuacjach są nieskuteczne (np. w przypadku wybicia szyby). Znacznie skuteczniejszym, ale też bardzo drogim rozwiązaniem może być zastosowanie do zabezpieczenia tych elementów aktywnych barier podczerwieni. Równie skuteczne jest zastosowanie ultradźwiękowych czujek ruchu, jednak ich efektywne działanie jest możliwe tylko w obrębie małych obiektów. W takim przypadku chroniona jest cała przestrzeń wewnątrz chronionego obiektu, która jest ograniczona jego elementami konstrukcyjnymi.
Ultradźwiękowe czujki ruchu nie są dużo droższe od czujek kontaktronowych i stykowych, a ich zastosowanie umożliwia znacznie większą wykrywalność zagrożeń (chroniony jest cały obszar, na który może wtargnąć intruz). Mogą zatem skutecznie zastąpić obecnie stosowane rozwiązania.
dr inż. Marcin Buczaj
Politechnika Lubelska,
Katedra Inżynierii Komputerowej i Elektrycznej
Zabezpieczenia 6/2011
Literatura
- Buczaj M., Czas jako kryterium skuteczności przebiegu procesu neutralizacji zagrożeń w systemach nadzorujących stan chronionego obiektu, Zabezpieczenia nr 6(70)/2009.
- Buczaj M., Strefowa organizacja systemów alarmowych w aspekcie realizacji założonych zadań ochrony w obiektach budowlanych, Zabezpieczenia nr 5(81)/2011.
- Halliday D., Resnick R., Walker J., Podstawy fizyki. T. 2, PWN, Warszawa 2008.
- Nawrowski R., Skowronek K., Systemy alarmowe pojazdów samochodowych, Wydawnictwo Politechniki Poznańskiej, Poznań 1997.
- Gajek A., Juda Z., Czujniki, Wydawnictwo WKiŁ, Warszawa 2008.
- Resnick R., Halliday D., Fizyka cz. 1, PWN, Warszawa 2001.
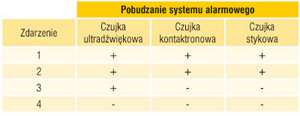
Tab. 1. Wyniki badań – pobudzanie systemu alarmowego